RL Algorithms: PPO-RLHF & GRPO-family
导言
- RLHF 利用复杂的反馈回路,结合人工评估和奖励模型来指导人工智能的学习过程。(RLHF = 人类偏好数据 + Reward Model + RL(如 PPO), 所以RLHF是RL的一种实践方式)
- 尽管DPO相对于PPO-RHLF更直接,但是(Reinforcement Learning from Verifiable Rewards (RLVR))往往效果更好;
- 而RLVR算法在 2025年的GRPO提出后,其变种和应用范围迎来了井喷爆发。
- 本文详细介绍 PPO、GRPO以及DAPO。
必看好文6
后训练/微调/RL的必要性¶
大型语言模型(Large Language Models, LLMs)的出现是人工智能领域的一个重要里程碑。这些模型通过在海量的文本语料库上进行自监督预训练,掌握了强大的语言理解和生成能力。6
然而,预训练的目标(如“下一个词预测”)本质上是模仿数据分布,这并不足以保证模型生成的内容完全符合人类的价值观和期望。未经对齐的LLM可能会产生不准确、有偏见、有害甚至虚构的内容。
因此,模型对齐(Alignment)应运而生。其核心目标是微调预训练模型,使其行为与人类的意图、偏好和价值观(如有帮助性、诚实性、无害性,即“3H”原则)保持一致。这是确保LLM安全、可靠地部署于现实世界的关键步骤。
为了应对对齐挑战,研究界探索了多种方法,其中基于人类反馈的强化学习(Reinforcement Learning from Human Feedback, RLHF)迅速成为主导范式。RLHF的核心思想是将人类的偏好数据转化为一个数值奖励信号,然后利用强化学习算法优化语言模型的策略(即其生成文本的方式),以最大化期望奖励。
在LLM对齐的早期探索中,研究者们建立了两种影响深远的基础范式。
- 一种是基于强化学习的PPO,它将经典的RL框架引入LLM微调,通过复杂的系统协调实现了强大的性能;
- 另一种是DPO,它通过深刻的理论洞见,将对齐问题转化为一个更简洁的监督学习问题,显著提升了训练的稳定性和效率。
RLHF流程中的近端策略优化 (PPO)¶
近端策略优化(Proximal Policy Optimization, PPO)是RLHF框架中最具代表性的算法之一。它由OpenAI在2017年提出,旨在解决传统策略梯度方法训练不稳定、对步长选择敏感的问题。PPO的核心思想是通过在策略更新中引入“信任区域”的概念,限制新旧策略之间的差异,从而实现稳定高效的训练,成为了对齐研究的基石。6
经典的三阶段RLHF流程¶
标准的PPO-RLHF流程是一个系统性的工程,旨在将抽象的人类偏好转化为具体的模型行为。它主要包含以下三个阶段:6
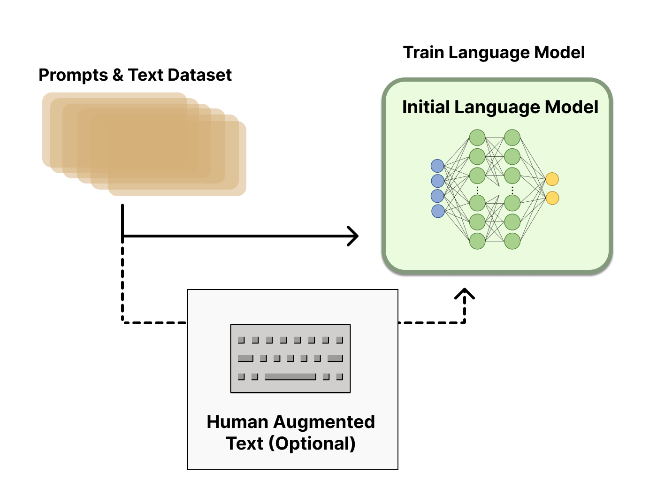
SFT¶
监督微调(Supervised Fine-Tuning, SFT): 首先,选择一个预训练好的LLM作为基础模型。然后,使用一个高质量、人工策划的指令-回答数据集对该模型进行微调。这个阶段的目标是让模型初步具备遵循指令和进行特定任务(如对话、摘要)的能力,为后续的RL阶段提供一个良好的策略起点。6
RM¶
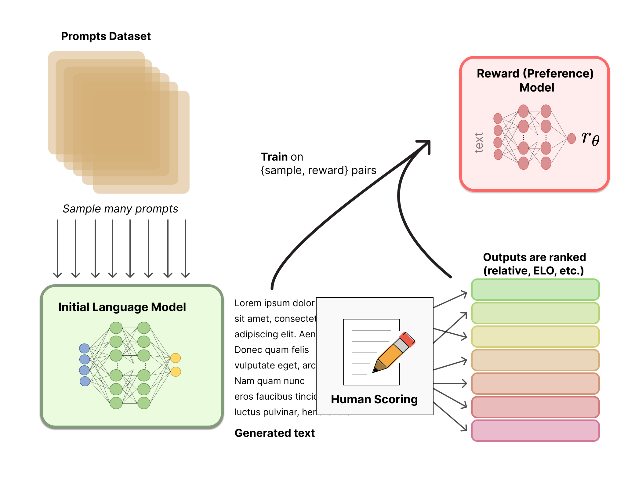
奖励模型(Reward Model, RM)训练: 此阶段的核心是将人类偏好量化。
- 首先,针对一系列提示(prompts),使用SFT模型生成两个或多个不同的回答。
- 然后,人类标注员对这些回答进行排序,指出哪个更好。
- 这些成对的偏好数据(例如,对于提示 ,回答 优于 )被用来训练一个独立的奖励模型 。该模型输入一个提示和回答,输出一个标量分数,分数越高代表该回答越符合人类偏好。奖励模型通常基于Bradley-Terry模型进行优化,最大化预测偏好与人类标注一致的概率。
RL Fine-Tuning¶
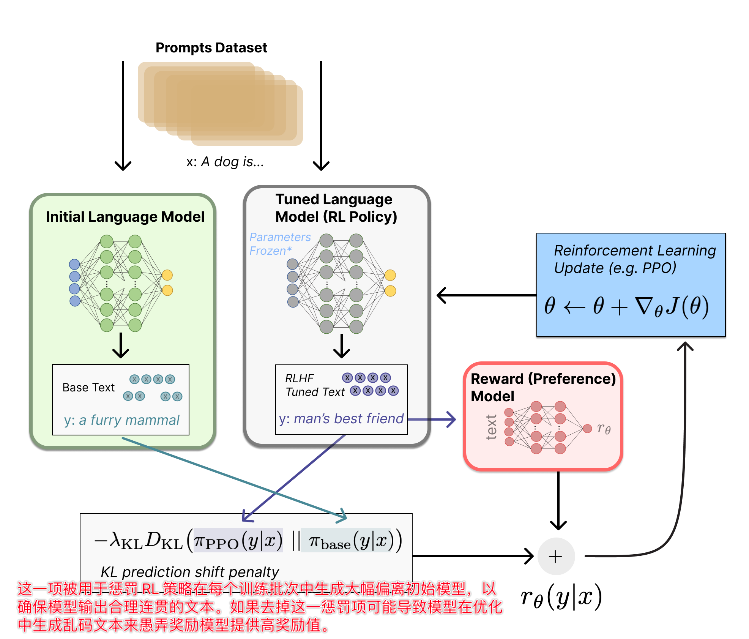
强化学习微调(RL Fine-Tuning): 这是最后也是最核心的阶段。SFT模型作为初始策略,在RL环境中进行优化。
- 环境每次提供一个提示 ,策略模型 生成一个回答 。
- 随后,训练好的奖励模型 对这个回答 进行评分,得到一个奖励值。
- PPO算法的目标就是最大化这个奖励值,同时通过一个KL散度惩罚项来约束优化后的策略 不过于偏离初始的SFT策略 ,以防止模型遗忘预训练知识或产生语法不通顺的文本。
Vanilla Policy Gradient (VPG) 2020¶
VPG,又名 REINFORCE,是策略梯度方法的基础。它的目标是通过梯度上升来最大化期望奖励。 VPG 的一个主要问题是梯度估计的方差很高,导致训练不稳定。
Proximal Policy Optimization(PPO) (2017)¶
为了解决 VPG 的高方差和不稳定性问题,Schulman 等人提出了 PPO。PPO 引入了重要性采样 (importance sampling)、裁剪 (clipping) 和一个价值函数 (value function) 来计算优势 (advantage)。
PPO需要协调四个模型:
- 策略模型(Policy Model): 正在被优化的LLM,即Actor。
- 价值模型(Value Model): 通常称为Critic,用于评估在给定状态下策略可能获得的期望回报,以降低策略梯度的方差。
- 奖励模型(Reward Model): 在RL微调阶段参数固定,为策略模型提供奖励信号。
- 参考模型(Reference Model): 通常是SFT模型的副本,参数固定,用于计算KL散度惩罚。
下面逐步解释:
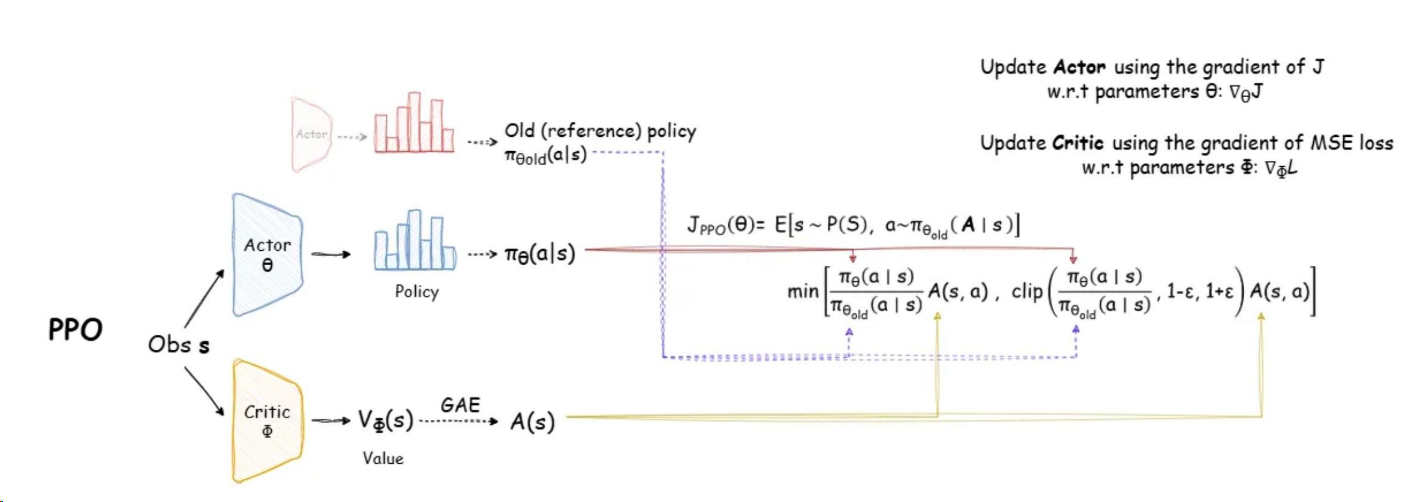
PPO 的核心思想¶
PPO 是一种 策略梯度(Policy Gradient) 方法,目标是直接优化策略 \(\pi_\theta(a|s)\),使得期望回报最大化:
但直接优化容易导致策略更新过大,造成训练崩溃。PPO 通过引入 “信赖域”约束(trust region) 来限制策略更新幅度,从而保证稳定性。
具体做法是使用 重要性采样比例(Importance Sampling Ratio):
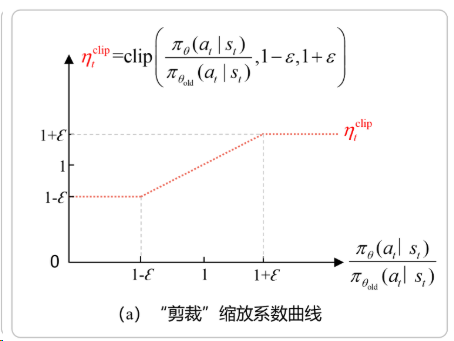
然后构造 Clipped Surrogate Objective:
其中: - \(\hat{A}_t\) 是 优势函数(Advantage) 的估计(关键!) - \(\epsilon\) 是一个小常数(如 0.2),控制策略更新幅度
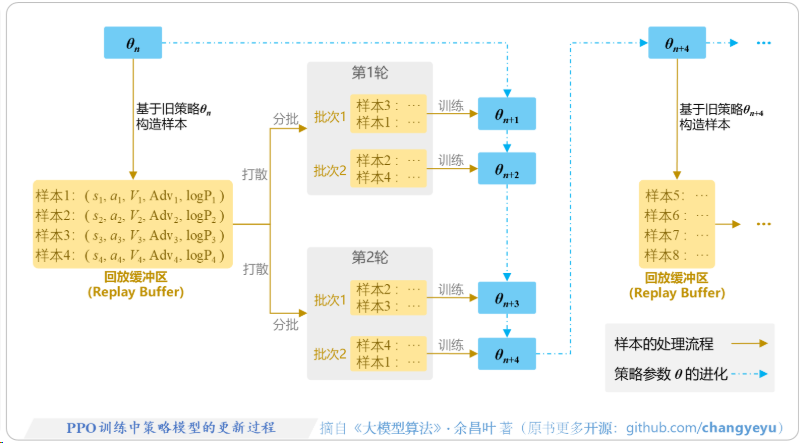
回放缓冲区就是存的推理的结果
核心GAE(Generalized Advantage Estimation)¶
优势函数 \(A(s,a)\) 的作用¶
策略梯度中,我们希望知道:
“在状态 \(s\) 下采取动作 \(a\),比平均策略好多少?”
这由 优势函数 定义: $$ A^\pi(s,a) = Q^\pi(s,a) - V^\pi(s) $$
- \(Q^\pi(s,a)\):执行动作 \(a\) 后按策略 \(\pi\) 继续的回报
- \(V^\pi(s)\):在状态 \(s\) 下按策略 \(\pi\) 继续的期望回报
优势函数 降低方差(相比直接用回报 \(R_t\)),使训练更稳定。
GAE 是优势函数的高效低方差估计器¶
真实 \(A(s,a)\) 无法直接计算,GAE 提供一种 偏差-方差权衡 的估计:
其中:
- \(\gamma\):折扣因子
- \(\lambda\):GAE 超参(\(\lambda=0\) → 高偏差低方差;\(\lambda=1\) → 低偏差高方差)
✅ GAE 的优势: - 利用 learned value function \(V(s)\) 来减少回报估计的方差 - 通过 \(\lambda\) 平滑地插值 between Monte Carlo(无偏)和 TD(0)(低方差) - 是 PPO 稳定训练的关键组件
所以,GAE 不是 PPO 的“可选”组件,而是其高效梯度估计的核心。
PPO的问题¶
尽管PPO在RLHF中取得了巨大成功,但将其应用于LLM时面临着诸多严峻挑战,这些挑战也催生了后续算法的诞生。
- 系统复杂性: PPO-RLHF流程需要同时协调四个大型模型:策略模型、价值/评论家模型、奖励模型和参考模型。这种多模型架构使得训练、调试和扩展变得极其困难和昂贵。
- Reward Hacking: 这是一个根本性问题,即策略模型学会了利用奖励模型的漏洞来获得高分,而其生成的回答在人类看来质量并未提升,甚至更差。这种现象也被称为“模式崩溃(pattern collapse)”。模型会发现某些特定的文本模式或风格(如过度礼貌、冗长)能稳定地骗取奖励模型的高分,从而过度生成这些模式,导致输出质量下降。这暴露出RLHF的上限严重依赖于奖励模型的质量和鲁棒性。
- KL散度控制: 在RLHF中,KL散度惩罚项被直接加入到奖励中:。这个惩罚项至关重要,它既作为熵奖励鼓励探索,又防止策略偏离SFT模型太远。然而, 的取值非常敏感:如果 太小(约束太弱),策略可能会过度优化奖励模型,导致策略发散和奖励滥用;如果 太大(约束太强),则会扼杀模型的学习能力,使其无法充分利用奖励信号进行改进。找到KL散度的最佳平衡点是PPO调优中的一个核心难题。
涉及模型¶
“为什么需要 reward、reference、value 三个 model”?
这里可能存在一些术语混淆。标准 PPO 并不需要三个独立模型,但某些扩展场景(尤其是 LLM 的强化学习对齐,如 RLHF)会引入额外组件。
我们分情况说明:
标准 PPO:¶
只需要 两个网络(通常共享底层)(如 Atari、MuJoCo): 1. Policy Network(Actor):输出动作分布 \(\pi_\theta(a|s)\) 2. Value Network(Critic):输出状态价值 \(V_\phi(s)\),用于计算 GAE
所以是 两个 head,一个或两个 model,但没有 reward model 或 reference model
在 LLM + RLHF 场景中:¶
为对齐人类偏好,PPO 被用于微调语言模型,此时引入 三个模型(如 InstructGPT、Llama-2-Chat):
| 模型 | 作用 | 是否更新 |
|---|---|---|
| Policy Model(Actor) | 当前要优化的 LLM(如 Llama) | ✅ 是,通过 PPO 更新 |
| Reward Model(RM) | 输入 prompt + response,输出人类偏好打分(标量) | ❌ 冻结,不更新 |
| Reference Model | 初始 SFT 模型(监督微调后的 checkpoint) | ❌ 冻结,用于 KL penalty |
此时 reward 并非环境反馈,而是由 Reward Model 预测;同时为防止策略偏离太远,加入 KL 散度惩罚项:
所以,“三个模型”是 RLHF 框架的特征,而非 PPO 本身的必需。
总结:¶
- 经典 PPO:1 个策略 + 1 个价值网络(共两个模型/heads)
- PPO in LLM(RLHF):Policy + Reward Model + Reference Model(三个)
- Reward Model:提供 reward 信号
- Reference Model:防止策略坍塌或胡说(通过 KL 约束)
- Value Model:依然需要(用于 GAE)
总结¶
| 问题 | 回答 |
|---|---|
| PPO 核心是什么? | 通过 clipping 机制限制策略更新幅度,保证稳定训练 |
| 为什么 GAE 是核心? | GAE 提供低方差、可调偏差的优势估计,是策略梯度有效的关键 |
| 为什么需要三个模型? | 标准 PPO 不需要;但在 LLM 的 RLHF 场景中,为实现人类偏好对齐,引入了冻结的 Reward Model 和 Reference Model |
如果你是在多模态强化学习或 LLM RL 场景下使用 PPO(如基于 VeRL 框架),那么三个模型的架构确实常见,但其动机来自于 对齐目标 和 稳定性约束,而非 PPO 算法本身。
PPO 初始权重¶
我们来逐个分析这四个模型在 PPO for LLM(RLHF) 场景中的来源与初始化关系:
四个模型的角色回顾¶
| 模型 | 作用 | 是否训练 | 典型来源 |
|---|---|---|---|
| Policy Model | 当前待优化的策略(生成 response) | ✅ 是 | SFT checkpoint |
| Value Model | 估计状态价值 \(V(s)\),用于 GAE | ✅ 是(通常从头训或微调) | 可能来自 Policy 的副本,但 head 不同 |
| Reward Model (RM) | 给出 prompt + response 的标量 reward | ❌ 否(冻结) | 独立训练的偏好模型(pairwise ranking) |
| Reference Model | 提供 KL 散度基准,防策略崩溃 | ❌ 否(冻结) | 与 Policy 初始相同(即 SFT checkpoint) |
初始权重是否一样?¶
1. Policy Model 与 Reference Model¶
- ✅ 初始完全相同。
- 两者都初始化自 监督微调(SFT)后的 checkpoint。
- 在 PPO 开始后:
- Policy 被更新;
-
Reference 冻结,用于计算 KL penalty:
\[ \mathcal{L}^{\text{KL}} = \beta \cdot D_{\text{KL}}\left( \pi_{\theta}(a|s) \,\|\, \pi_{\text{ref}}(a|s) \right) \] -
这是防止语言模型“过度优化 reward 而胡说八道”的关键机制。
2. Value Model 的初始化¶
- 通常初始化自 Policy Model 的主干(backbone),但:
- 最后的 LM head 被替换为 scalar value head(一个线性层输出标量);
- 有些实现中,value head 是随机初始化的,主干权重 copy 自 SFT model;
- 也有做法是从头训练 value model(但效率低,不稳定)。
- 所以:主干权重 ≈ Policy 初始权重(即 SFT checkpoint),但输出 head 不同。
📌 示例(如 HuggingFace TRL 或 OpenAI 的 InstructGPT):
RM 则完全独立:policy = AutoModelForCausalLM.from_pretrained("sft_model") reference = AutoModelForCausalLM.from_pretrained("sft_model") # same weights value = AutoModelForCausalLM.from_pretrained("sft_model") value.lm_head = nn.Linear(hidden_size, 1) # replace LM head with value headrm = RewardModel.from_pretrained("rm_model")
3. Reward Model (RM)¶
- ❌ 权重与其他三个无关。
- RM 是通过 人类偏好数据(如 chosen/rejected pairs) 单独训练的(通常用 ranking loss,如 Bradley-Terry);
- 结构上可能和 LLM 主干相同(如 Llama backbone + reward head),但:
- 训练目标不同
- 数据不同
- 通常不共享任何训练过程
- 因此,RM 的权重 ≠ SFT checkpoint
总结:初始权重关系图¶
SFT Checkpoint
│
├───▶ Policy Model (trainable)
│
├───▶ Reference Model (frozen, identical to Policy at t=0)
│
└───▶ Value Model backbone (frozen or trainable; value head usually new)
Reward Model ──▶ Trained separately on preference data (unrelated weights)
所以:
✅ Policy 与 Reference 初始权重完全相同(都来自 SFT)
✅ Value Model 主干通常 copy 自 SFT(即与 Policy 初始一致),但 head 不同
❌ Reward Model 是独立训练的,权重与其他三个无关
优化¶
你在使用 VeRL 或自研框架 做多模态 RL + LLM 对齐时,需要注意:
- 显存优化:Policy 和 Reference 可共享 embedding 等只读参数(若框架支持 weight tying / shared read-only views);
- Value head 初始化:建议用 small init(如 zero-mean Gaussian),避免 GAE 初期偏差过大;
- Reward Model 一致性:确保 RM 的 tokenizer、prompt format 与 Policy 严格一致,否则 reward 会失真;
- NPU 优化:Policy/Reference/Value 主干结构相同,可复用同一份编译图(如 on NPU),仅 head 分支不同,有利于融合算子(如 GMM)优化。
VeRL参数对应 (PPO)¶
你提出的问题非常精准:如何将 VeRL 的 PPO 配置参数(如 actor_rollout_ref.actor、actor_rollout_ref.rollout、critic.model)与 LLM+RLHF 中“Policy / Reference / Reward / Value” 四个模型的概念对应起来?
我们来系统地拆解 VeRL 框架中这些模块的实际角色,并和理论中的四个模型一一映射。
VeRL 的模块命名逻辑¶
VeRL(Vectorized Efficient Reinforcement Learning)是一个面向大模型 PPO 训练的高性能 RL 框架,其设计融合了 actor-critic 架构 和 分布式推理/训练优化。它的配置层级如下:
actor_rollout_ref:
├── actor → 策略模型(Policy),可训练
├── rollout → 用于生成样本的推理引擎(通常是 vLLM)
└── ref (隐含) → Reference Model(冻结)
critic:
└── model → Value Network(Critic),可训练
reward model → 通常在 data pipeline 或 reward function 中指定(本脚本未显式出现)
注意:actor_rollout_ref 是一个复合组件,包含 actor(Policy)、rollout(推理引擎) 和 reference(Reference Model) 三者。
理论四模型 ↔ VeRL 实际组件映射¶
| 理论中的模型(RLHF) | VeRL 中的对应项 | 是否训练 | 权重来源 |
|---|---|---|---|
| Policy Model | actor_rollout_ref.actor |
✅ 是 | Qwen/Qwen3-8B(SFT checkpoint) |
| Reference Model | 隐式包含在 actor_rollout_ref 中(通常和 actor 初始相同但冻结) |
❌ 否 | 同 actor 初始权重(SFT) |
| Value Model (Critic) | critic.model |
✅ 是 | Qwen/Qwen3-8B(主干 copy 自 SFT,但 head 替换为 value head) |
| Reward Model (RM) | 未在该命令中显式配置(通常在 reward pipeline 中加载) | ❌ 否 | 独立训练的 RM(如 Qwen3-RM) |
✅ 关键结论: -
actor_rollout_ref.actor= Policy -actor_rollout_ref.rollout≠ 模型,而是 用 vLLM 引擎执行 actor(或 ref)前向推理 的工具(用于高效生成 response + logprob) -critic.model= Value Network - Reference Model 是actor_rollout_ref内部另一个冻结的副本(和 actor 初始同源) - Reward Model 通常在data模块或自定义 reward function 中加载(该脚本省略了,但实际运行时会用到)
消失的Reward Model¶
- 在 VeRL 中,Reward Model 通常通过 自定义 reward function 注入
- 可能配置在 YAML 或代码中,例如:
- 因此,命令行中不直接出现 RM 路径是正常的
但经常实际上并不在使用 Reward Model(RM),而是采用了一种 基于规则或自动评分的 reward 函数(比如格式分 + 答案相似度),常见于数学推理、选择题、判断题等结构化任务(如 MATH、GSM8K 等)。
这意味着PPO 设置不属于典型的 RLHF(Reinforcement Learning from Human Feedback),而更接近 “Supervised Reward + PPO” 或 “Automated Reward Shaping” 的范式。
修正后的模型角色映射¶
只有三个模型参与训练和推理:
| 模型 | VeRL 中的对应项 | 是否训练 | 作用 |
|---|---|---|---|
| Policy (Actor) | actor_rollout_ref.actor |
✅ 是 | 生成 response(如数学解答) |
| Reference Model | 隐含在 actor_rollout_ref 中(但当前未启用) |
❌ 否(若 use_kl_loss=False) |
用于 KL penalty(防止策略偏离太远) |
| Value Network (Critic) | critic.model |
✅ 是 | 估计状态价值,用于 GAE |
🚫 Reward Model:不存在
✅ Reward:由规则函数计算(如:reward = 0.5 * format_score + 0.5 * answer_correctness)
设计合理性¶
在 数学推理、编程、选择题等任务中: - 答案具有客观标准(对/错、匹配/不匹配); - 人工标注偏好数据(如 RM 所需的 chosen/rejected pairs)成本高; - 自动评分规则(如正则匹配、AST 比较、字符串相似度)足够可靠。
因此,直接用程序化 reward 替代 RM 是工业界和学术界的常见做法(例如:AlphaCode、LeanDojo、MAmmoTH 等工作)。
RLVR¶
RLVR: 尽管DPO提供了一条优雅的替代路径,但在许多需要模型进行复杂、多步推理的任务(如数学、编程)中,基于强化学习的方法依然显示出独特的优势。这类任务的奖励通常是二元的(答案正确或错误),可以通过程序自动验证,这被称为可验证奖励的强化学习(RL with Verifiable Rewards, RLVR)。
然而,PPO的计算和内存开销依然是一个巨大的障碍,特别是其与策略模型大小相当的评论家模型。这催生了一系列旨在保留RL优势同时降低其复杂性的新算法。
这一系列算法的演进过程揭示了一个清晰的研究轨迹。
- 首先,GRPO通过移除PPO中资源消耗巨大的评论家模型,实现了在推理任务上的重大效率突破。然而,这一看似简单的改动并非没有代价,它引入了一系列更微妙的、先前未被充分认识的问题。
- 随后的“G家族”算法——Dr. GRPO、GSPO、和GMPO——可以被看作是对GRPO核心框架的一系列精准“补丁”。每一个新算法都识别并修正了GRPO的一个特定缺陷,共同完善了最初的“无评论家”概念,使其变得更加稳定和可控。
GRPO (DeepSeek 2024)¶
Group Relative Policy Optimization (GRPO)2相对于PPO省略了value model,而是从组中估计baseline,显著减少了资源消耗。
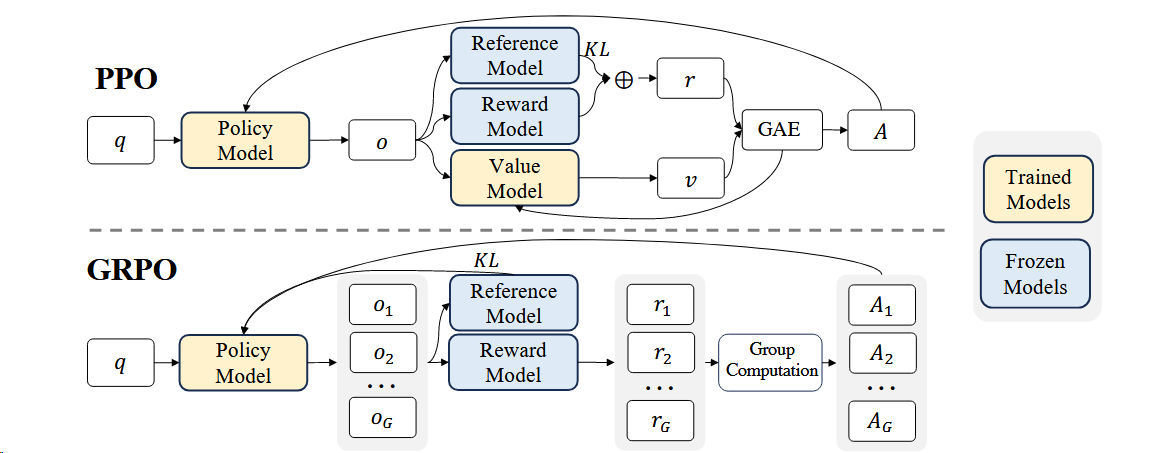
具体来说, 在PPO中,GAE需要与policy model一起训练value model,来减轻奖励模型的过度优化,标准方法是在每个token的reward中添加来自reference模型的每个token的KL惩罚
1. 用多回答均值替代 GAE(优势估计)¶
- PPO:依赖 critic(value network)估计状态价值 \(V(s)\),再通过 GAE 计算优势 \(\hat{A}_t\)。
- GRPO:不要 critic!对同一个 prompt 生成 \(K\) 个 responses(即
rollout_n=K),用这 \(K\) 个 reward 的样本均值作为 baseline,计算每个 response 的中心化 reward:
$$ \tilde{r}^{(i)} = r^{(i)} - \frac{1}{K} \sum_{j=1}^K r^{(j)} $$
这个 \(\tilde{r}^{(i)}\) 直接替代了 PPO 中的 \(\hat{A}_t\)。
✅ 这本质上是一种 无 critic 的优势估计,假设同一 prompt 下不同 response 的 reward 波动反映了“好坏相对性”。
2. KL 散度定义一样在 policy 与 reference 之间(而非 policy 与旧 policy)¶
- 标准 PPO:KL penalty 通常用于 LLM RLHF 中约束新策略 \(\pi_\theta\) 与 reference model \(\pi_{\text{ref}}\)(SFT checkpoint)的距离。
- GRPO:明确将 KL 项写为:
$$ \mathcal{L}^{\text{KL}} = \beta \cdot D_{\text{KL}}\left( \pi_{\theta}(\cdot|s) \,|\, \pi_{\text{ref}}(\cdot|s) \right) $$
而不是像某些 PPO 实现那样用 old policy(\(\pi_{\text{old}}\))做 KL。
✅ 这和你观察到的 VeRL 中
compute_old_logp(用于 importance ratio)和compute_ref_logp(用于 KL)的分离是一致的。
3. 完全移除了 Value Network(Critic)¶
- GRPO 不需要训练 critic,省去了:
- critic 模型的显存
- critic 的训练超参(lr、batch size 等)
- GAE 的 \(\lambda, \gamma\) 调参
- 这极大简化了系统,尤其适合 reward 可靠、任务结构清晰 的场景(如你的数学题)。
4. Policy Update 使用 “平均梯度” 而非 clipped ratio¶
- GRPO 的 loss 为:
$$ \mathcal{L}^{\text{GRPO}} = -\mathbb{E}{i=1}^K \left[ \tilde{r}^{(i)} \cdot \log \pi\theta(a^{(i)}|s) \right] + \beta \cdot D_{\text{KL}}(\pi_\theta | \pi_{\text{ref}}) $$
- 没有 importance sampling ratio,也没有 clipping!
- 相当于把每个 response 看作一个样本,用 中心化 reward 作为权重,直接做加权 MLE。
💡 这比 PPO 更简单,但依赖 多回答采样(rollout_n > 1) 来获得 reward 方差估计。
5. 对并行采样的强依赖¶
- GRPO 要求 每次训练 step 对每个 prompt 生成 K 个 response(通常 K=4~16)。
- 这对 rollout 引擎(如 vLLM)的 batched generation 能力要求高。
- VeRL 正好通过
rollout_n控制这个行为,天然适配 GRPO。
6. 更适合“轨迹级 reward”任务¶
- GRPO 假设 整个 response 对应一个 scalar reward(如 0/1 正确性),而不是 step-wise reward。
- 这和 LLM 生成任务天然匹配(端到端 reward),而 PPO 最初为 step-wise RL(如 Atari)设计。
- GRPO 本质是 PPO 在 LLM + 自动 reward 场景下的简化特化版:
- 去掉 critic → 降低系统复杂度
- 用多回答采样替代 GAE → 避免 critic 训练不稳定
- 保留 KL(ref) → 防止语言退化
DAPO (2503 字节&清华)¶
GRPO的问题:
- RL流程细节不够,难复现,复现效果差: GRPO 基线存在几个关键问题,如熵崩塌、奖励噪声和训练不稳定性。
- KL 散度非必须:作者认为long-CoT reasoning model不需要和原本模型保持相似。
- 奖励模型非必要:作者使用了基于规则的奖励建模(通过规则计算奖励)
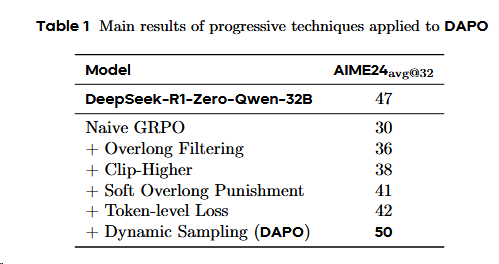
提出Decouple Clip and Dynamic sAmpling Policy Optimization,DAPO3
为了修复GRPO的策略退化问题提出了一下的trick:
- 裁剪偏移(Clip-Shifting)
- 问题:熵坍缩
- 方法:提高了clip高裁切的参数值,来允许低概率token快速提升概率。
- 动态采样(Dynamic Sampling)
- 问题:推理(采样)出来分数全为 0,或者1的case,是没有优势,对训练是无效的
- 方法:剔除这些case,一直推理直到batch填满。
- Token级策略梯度损失(Token-Level Policy Gradient Loss),在长思维链 RL 场景中至关重要;
- 问题:基于sample的loss计算,会导致CoT里长文本回答不被重视,从而导致长文本质量差,相应长度不正常的变化(不是缓慢增长)
- 方法:使用基于token的loss计算。
- 溢出奖励塑造(Overflowing Reward Shaping),减少奖励噪声并稳定训练。
- 问题: GRPO 原本对于超出response长度的回答都一刀切的惩罚,这会导致模型confused。
- 方法: 1. Overlong Filtering strategy:屏蔽截断样本的损失。 2. Soft Overlong Punishment: 引入临界长度缓冲区,来对超长序列给予与长度正相关的连续的惩罚值。
但同时字节DAPO的工作受到质疑:
- 过于工程(trick)、不够优雅、trick是否合理受到争议、
- 训练时间似乎也相对GRPO翻倍。动态采样增加20%的生成开销
- Overfitting的风险:文章提到在训练集上reward很高,但在验证集上效果不明显,这意味着存在过拟合的风险。
🔍 一、“Entropy Collapse” 是什么?¶
1. 策略熵(Policy Entropy)的定义¶
在强化学习中,策略 \(\pi(a|s)\) 是一个概率分布(对 LLM 来说,是 token 的 softmax 分布)。其熵定义为:
- 高熵:策略输出多样,不确定性强(如 softmax 接近 uniform)→ 探索性强
- 低熵:策略集中在少数动作上(如 softmax 尖峰)→ 确定性强,但可能过拟合
对 LLM 而言,每一步 token 的熵 可平均得到 序列级策略熵。
2. Entropy Collapse(熵崩溃)的含义¶
Entropy collapse 指在 PPO/GRPO 训练过程中,策略熵迅速下降至接近 0,导致模型输出趋于 deterministic(确定性)甚至 degenerate(退化)。
典型表现:
- 模型对所有问题都输出几乎相同的 token 序列(如固定开头、重复模式);
- 生成内容缺乏多样性,即使问题不同;
- 多回答采样(rollout_n)失效:K 个回答几乎完全一样;
- 在数学题中:总用同一种套路,甚至直接输出 “答案:X” 而无推理。
⚠️ 这不是收敛,而是训练崩溃的一种形式——模型“学会作弊”后停止探索。
🤔 二、为什么会出现 Entropy Collapse?(尤其在 LLM + PPO 中)¶
根本原因:Reward Signal + Policy Update 的正反馈循环¶
- Reward 信号稀疏或有偏
- 例如:只有最终答案正确才有 reward,中间过程无反馈;
-
模型偶然发现一种“高 reward 模板”(如 “解:xxx。答案:3”);
-
PPO 的 Clipping 机制放大优势
- 一旦某个 action 被赋予高 advantage,PPO 会强烈鼓励它;
-
同时 clipping 阻止了负样本的抑制,导致正样本过拟合;
-
缺乏探索机制
- LLM 的策略空间极大,但 on-policy 算法只从当前策略采样;
-
一旦策略集中,后续采样无法跳出局部最优;
-
KL Penalty 若未启用或太弱,无法约束退化
- 若
use_kl_loss=False(如你当前配置),模型可自由坍缩到 deterministic policy。
💡 Entropy collapse 是“奖励 hack”的自然结果:模型找到 reward 最大化路径后,不再尝试其他可能性。
📊 三、如何观测 Entropy Collapse?¶
在训练日志中监控:
- 平均策略熵(mean policy entropy):应缓慢下降,但不应趋近 0;
- 回答多样性:对同一 prompt 多次采样,计算 BLEU/Embedding 相似度;
- token 分布:观察 softmax 是否出现“one-hot”倾向。
在 VeRL 中,可以启用
trainer.log_policy_entropy=True(或类似选项)来记录。
DAPO clip higher¶
clip 函数有三个参数:
这实际上是 PPO 算法中“非对称裁剪(asymmetric clipping)” 的一种变体,相比标准 PPO 的对称裁剪(通常只用一个 \(\varepsilon\),如 0.2),它允许优势为正和负时使用不同的裁剪边界,从而更精细地控制策略更新。
下面逐个解释这三个参数的含义:
✅ 1. \( r_{i,t}(\theta) \):重要性采样比率(Importance Sampling Ratio)¶
这是 PPO 的核心:
- 表示当前策略 \(\pi_\theta\) 与 旧策略 \(\pi_{\theta_{\text{old}}}\) 在状态 \(s_t\) 下采取动作 \(a_t\) 的概率之比;
- 若 \(r_{i,t} > 1\):当前策略更偏好该动作;
- 若 \(r_{i,t} < 1\):当前策略更不偏好该动作。
💡 它衡量了“策略更新的幅度”,但直接优化它会导致训练不稳定,因此需要 clip。
✅ 2. \(1 - \varepsilon_{\text{low}}\):下界裁剪阈值(针对负优势或策略减小)¶
- \(\varepsilon_{\text{low}} > 0\)(如 0.2)
- 当 \(r_{i,t}(\theta) < 1 - \varepsilon_{\text{low}}\) 时,说明当前策略大幅降低了某动作的概率;
- PPO 会将其 裁剪到 \(1 - \varepsilon_{\text{low}}\),防止策略过快放弃某些动作(保留探索性)。
📌 这主要影响 负优势(\(\hat{A}_t < 0\)) 的样本:即使动作不好,也不允许概率降得太快。
✅ 3. \(1 + \varepsilon_{\text{high}}\):上界裁剪阈值(针对正优势或策略增大)¶
- \(\varepsilon_{\text{high}} > 0\)(如 0.2,也可设为不同值)
- 当 \(r_{i,t}(\theta) > 1 + \varepsilon_{\text{high}}\) 时,说明当前策略大幅提升了某动作的概率;
- PPO 会将其 裁剪到 \(1 + \varepsilon_{\text{high}}\),防止策略过激地偏向某些动作(避免崩溃)。
📌 这主要影响 正优势(\(\hat{A}_t > 0\)) 的样本:即使动作好,也不允许概率升得太猛。
📊 标准 PPO vs 非对称 Clip¶
| 类型 | 裁剪函数 | 特点 |
|---|---|---|
| 标准 PPO | \(\text{clip}(r_t, 1-\varepsilon, 1+\varepsilon)\) | 对称,\(\varepsilon_{\text{low}} = \varepsilon_{\text{high}} = \varepsilon\) |
| 非对称 PPO(如 DAPO) | \(\text{clip}(r_t, 1-\varepsilon_{\text{low}}, 1+\varepsilon_{\text{high}})\) | 可分别控制“增大”和“减小”的步长 |
例如: - 设 \(\varepsilon_{\text{low}} = 0.1\),\(\varepsilon_{\text{high}} = 0.3\)
→ 允许策略更激进地增加好动作的概率,但更保守地减少坏动作的概率(保留探索)。
🧠 为什么需要非对称裁剪?(DAPO 的动机)¶
在 LLM 强化学习中: - 正优势样本(正确回答)非常稀疏 → 需要更强的学习信号(允许更大的 \(r_t\),即更大的 \(\varepsilon_{\text{high}}\)); - 负优势样本(错误回答)很多 → 但不能一刀切地抛弃,否则 entropy collapse(需更小的 \(\varepsilon_{\text{low}}\),即裁剪更紧)。
因此,非对称 clip 是对标准 PPO 的改进,尤其适合 reward 稀疏、高维动作空间(如 LLM)的场景。
📌 在 PPO Loss 中如何使用?¶
完整目标函数为:
- 当 \(\hat{A}_t > 0\)(好动作):clip 上限防止过拟合;
- 当 \(\hat{A}_t < 0\)(坏动作):clip 下限防止过放弃。
✅ 总结¶
| 参数 | 含义 | 典型值 | 作用 |
|---|---|---|---|
| \(r_{i,t}(\theta)\) | 当前策略 vs 旧策略的概率比 | 动态变化 | 衡量策略变化幅度 |
| \(1 - \varepsilon_{\text{low}}\) | 概率减小的下限 | 0.8–0.9 | 防止过快放弃动作(保探索) |
| \(1 + \varepsilon_{\text{high}}\) | 概率增大的上限 | 1.1–1.3 | 防止过激偏向动作(保稳定) |
在 DAPO 等改进算法中,这种非对称设计能缓解 entropy collapse,提升样本利用效率,特别适合你正在做的 多回答、程序化 reward 的 LLM 数学推理训练。
如果你在 VeRL 中看到类似 clip_range_low 和 clip_range_high 的配置项,那就是对应 \(\varepsilon_{\text{low}}\) 和 \(\varepsilon_{\text{high}}\)。
参考文献¶
-
https://huggingface.co/blog/zh/rlhf ↩
-
DeepSeekMath: Pushing the limits of mathematical reasoning in open language models ↩
-
DAPO: An Open-Source LLM Reinforcement Learning System at Scale ↩
-
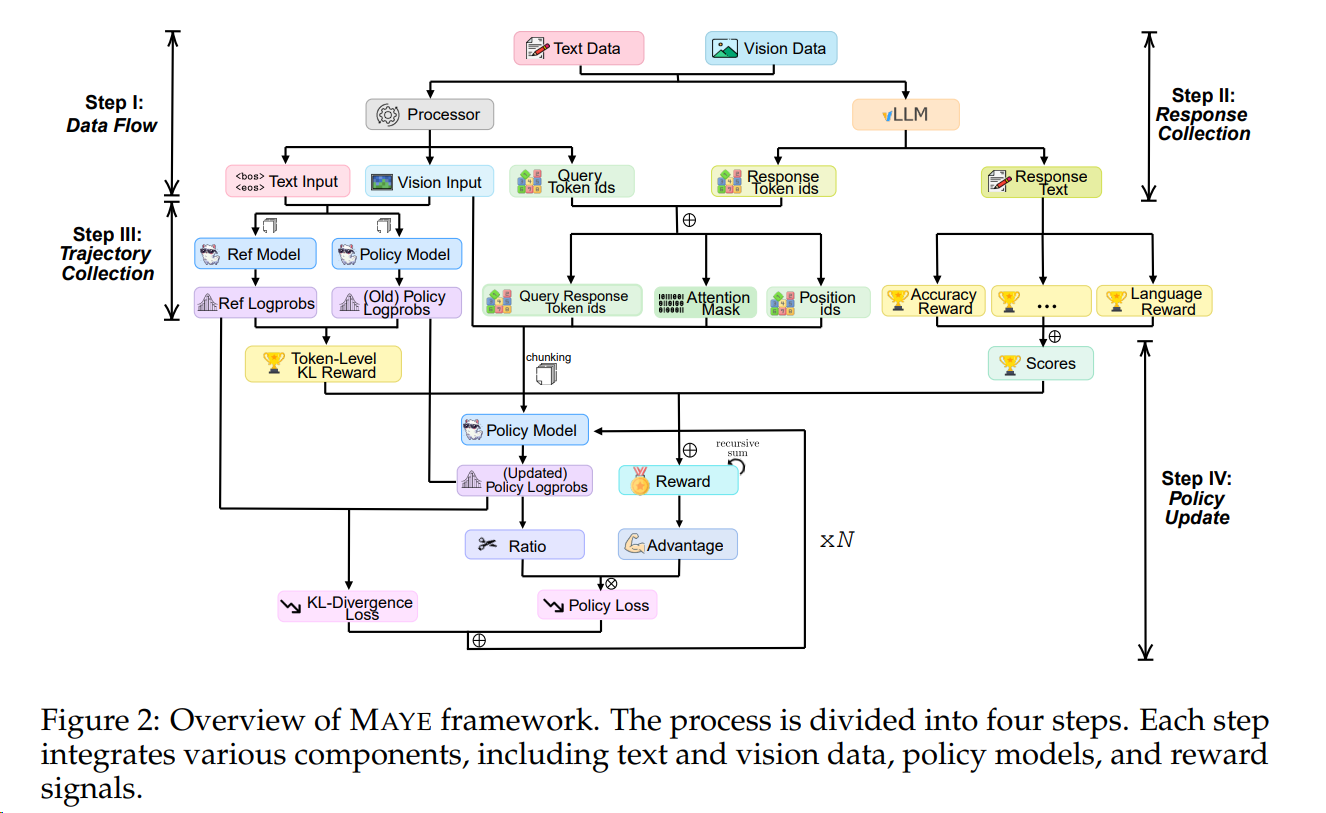
Rethinking RL Scaling for Vision Language Models: A Transparent, From-Scratch Framework and Comprehensive Evaluation Scheme ↩